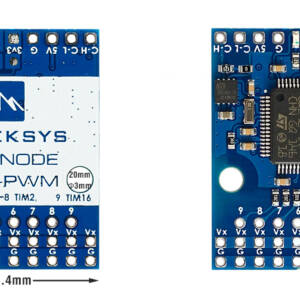


Matek AP_Periph DroneCAN to PWM Adapter
Seamlessly integrate your favorite DShot ESCs and PWM servos into a modern DroneCAN ecosystem with the Matek CAN-L4-PWM Adapter Node. This powerful device acts as a bridge, converting DroneCAN bus signals into standard PWM or DShot outputs. It is the perfect solution for builders of large FPV drones, fixed-wing aircraft, and VTOLs who want the robust, simplified wiring of a CAN bus without needing to use expensive, specialized CAN-native peripherals.
Simplify Your Wiring with DroneCAN
The CAN-L4-PWM dramatically simplifies the wiring of complex aircraft. Instead of running long, individual signal wires for every motor and servo from your flight controller, you can run a single 4-wire CAN bus cable to this node. The node is then placed locally on a wing or arm to distribute the PWM/DShot signals, resulting in a much cleaner, lighter, and more reliable build.
Full DShot & ESC Telemetry over CAN
This adapter provides up to 9 PWM outputs, 8 of which support bi-directional DShot. It allows you to use your preferred DShot-capable ESCs on the CAN bus with full functionality. It also supports full BLHeli_32 ESC telemetry, collecting data like RPM, temperature, and voltage from each ESC and sending it back to the flight controller over the robust CAN bus link.
Optimized for ArduPilot
Running on the proven ArduPilot AP_Periph firmware, this adapter ensures reliable and seamless integration with flight controllers running ArduPilot. It’s an essential drone part for advanced UAV projects that leverage the power and flexibility of the DroneCAN protocol.
Specifications
- Brand: Matek
- Model: CAN-L4-PWM
- MCU: STM32L431xC, 256KB Flash
- Firmware: ArduPilot AP_Periph (MatekL431-Dshot)
- Protocol: DroneCAN
- Input Voltage: 4.5V – 5.5V (to the board)
- PWM Outputs: 9 (8x DShot capable)
- UARTs: 1.5 (for ESC Telemetry & other functions)
- Mounting: 20mm x 20mm (M3)
- Dimensions: 32mm x 25.4mm
- Weight: 3.5g
What’s in the Box?
- 1x CAN-L4-PWM Board
- 1x JST-GH-4P to JST-GH-4P Cable (20cm)