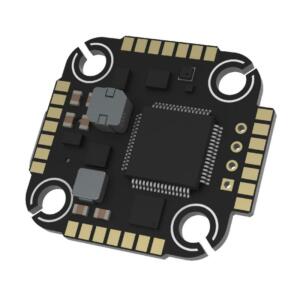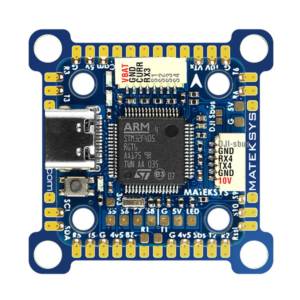




Matek F405-miniTE 20×20 Flight Controller
Check out all of our Matek Products!
The new features of F405-miniTE compared with F722-miniSE (EOL)
- F405 has 1MB flash which can run with ArduPilot. even with INAV firmware, some features will be removed on F722 due to limited flash.
- The advantage of F722 is all UARTs have builtin inversion which is not needed when CRSF protocol is widely used on new receivers.
- Redesigned target MATEKF405TE support 8x bi-directional DSHOT.
- Support DJI air unit PnP, and a 10V BEC for DJI OSD or analog VTX
- Compared with F722-miniSE 8motors or 6motor+2servos, F405-miniTE support 8motors+3servos in INAV/BF multirotor mixer
- InvenSense GEN3 IMU ICM42605
FC Specifications
- MCU: STM32F405RGT6
- IMU: ICM42605
- OSD: AT7456E
- Baro: Goertek SPL06-001 (I2C)
- Blackbox: 16M-byte Flash memory
- 6x UARTs, 1x Softserial_Tx option
- 12x PWM outputs (8x Dshot)
- 1x I2C
- 4x ADC (VBAT, Current, RSSI, Airspeed)
- 2x PINIO
- 1x SH1.0_8pin connector (Vbat/G/Curr/R3/S1/S2/S3/S4)
- 1x SH1.0_6pin connector for DJI FPV Air Unit
- 3x LEDs for FC STATUS (Blue, Green) and 3.3V indicator(Red)
- Dual BEC, 5V 1.7A & 10V 1.4A
- 10V output ON/OFF switchable
- Convertible 20mm to 30.5mm mounting
Power
- Input: 6~30V (2~S LiPo)
- BEC: 5V 1.7A, Max.2A
- BEC: 10V 1.4A for VTX or DJI Air Unit
- For stable 10V output, input voltage should > 11V, when input voltage =<11V, output = 90% input voltage.
- Battery Voltage Sensor: 1K:20K (INAV scale 2100, BF scale 210)
- No Current Sensor built-in, supports external current sensor of PDB/4in1
Firmware
- ArduPilot: MatekF405-TE
- INAV: MATEKF405TE (not available in INAV configurator for now)
- BetaFlight: MATEKF405TE
Physical
- Mounting
- 20 x 20mm/Φ3mm with Silicon Grommets
- 20 x 20mm/Φ2mm with Silicon & Brass Grommets
- 30.5 x 30.5mm/Φ3mm with Conversion Plate and Silicon Grommets
- Dimensions: 28 x 28 mm
- Weight: 5g
Including
- 1x FC F405-miniTE
- 1x 20mm to 30.5mm conversion plate(blue PCB)
- 6x Silicon grommets M4 to M3
- 6x Brass grommets M3 to M2
- 1x SH1.0_8pin cable 5cm (including 2x 8pin connectors) for 4in1 ESC
- 1x SH1.0_6pin to GH1.25_8pin cable 8cm for DJI Air Unit